Contrôle de sonar, groupe A : Différence entre versions
| Ligne 2 : | Ligne 2 : | ||
le sujet se trouve a la page: http://rex.plil.fr/Enseignement/Systeme/Projet.IMA3/systeme009.html | le sujet se trouve a la page: http://rex.plil.fr/Enseignement/Systeme/Projet.IMA3/systeme009.html | ||
| − | + | =objectifs= | |
| − | = objectif de séance 1: = | + | == objectif de séance 1: == |
-creer un code C demandant une position à l'utilisateur et faisant tourner le servomoteur en consequence | -creer un code C demandant une position à l'utilisateur et faisant tourner le servomoteur en consequence | ||
-creer un script javascript demandant une position à l'utilisateur | -creer un script javascript demandant une position à l'utilisateur | ||
| Ligne 9 : | Ligne 9 : | ||
-realiser une periode de une second pour le compteur remettre à 0 | -realiser une periode de une second pour le compteur remettre à 0 | ||
| − | = objectif de séance 2: = | + | == objectif de séance 2: == |
-lancer le code C via le script | -lancer le code C via le script | ||
| Ligne 15 : | Ligne 15 : | ||
-realiser l'émission et la reception avec FPGA | -realiser l'émission et la reception avec FPGA | ||
| − | = objectif de scéance 3: = | + | == objectif de scéance 3: == |
-recuperer la mesure du sonar et l'afficher<br /><br /> | -recuperer la mesure du sonar et l'afficher<br /><br /> | ||
-transferer le script sur une foxboard et tester | -transferer le script sur une foxboard et tester | ||
-tests avec la partie electronique | -tests avec la partie electronique | ||
| − | = Partie FPGA:= | + | |
| + | = Partie FPGA: = | ||
| + | == Schéma global de notre sujet ---Contrôle de sonar: == | ||
| + | [[Fichier:Schema global.jpg]] | ||
| + | == Schéma électronique du FPGA == | ||
[[Fichier:Sonar2.PNG]] | [[Fichier:Sonar2.PNG]] | ||
| + | == Des fonctions de chaque parties == | ||
| + | 1) Pour obtenir une signale de 40KHz, on utilise quatre CDIV en série qui divisent l’origine fréquence 50MHz. | ||
| + | |||
| + | 50M/5/10/5/5=40K | ||
| + | |||
| + | [[Fichier:40khz.PNG]]<BR> | ||
| + | |||
| + | 2) Au niveau d’émettre ce signale de 40KHz en 5 périodes, on utilise un compteur pour compter le nombre des périodes et aussi un comparateur. Si la valeur du compteur est supérieure à 5, GT=1, donc on ne peut pas continuer à émettre ce signale. | ||
| + | |||
| + | [[Fichier:Emission.PNG]]<BR> | ||
| + | |||
| + | 3) Au niveau de la réception, dès que le signale est réceptionné, il va donner un signal monté aux deux D flip-flops, alors on peut afficher la valeur du compteur. Comme on utilise un compteur de 8 bits, la valeur maximum qu’il compte par seconde est 255, donc on met la fréquence du compteur à 250Hz, alors il n’y a pas de risque du dépassement mais moins précis pour calculer la distance. | ||
| + | |||
| + | [[Fichier:Reception.PNG]]<BR> | ||
| + | |||
| + | 4) Comme le taux de rafraîchissement de la mesure sera fixé à 1 seconde, donc on utilise un compteur de 16 bits alimenté par une fréquence de 33,333Hz, car ''2^15/33,333=0.98s''. Après on redonner le commande d’émission. Et à la fin ce compteur remet à zéro. | ||
| + | |||
| + | [[Fichier:1seconde.jpg]]<BR> | ||
| + | |||
| + | = Partie analogique: = | ||
| + | == Schéma théorique == | ||
| + | - On doit utiliser des amplificateurs opérationnels pour augmenter ou diminuer le courrant pendant l’émission et la receptiont du signale.(non réaliser pratiquement) | ||
| + | |||
| + | |||
| + | =divers= | ||
script Foxboard: | script Foxboard: | ||
http://172.26.79.111/script.html | http://172.26.79.111/script.html | ||
Version du 3 juin 2011 à 13:23
Sommaire
Sujet
le sujet se trouve a la page: http://rex.plil.fr/Enseignement/Systeme/Projet.IMA3/systeme009.html
objectifs
objectif de séance 1:
-creer un code C demandant une position à l'utilisateur et faisant tourner le servomoteur en consequence -creer un script javascript demandant une position à l'utilisateur -comprendre ce que on doit faire avec FPGA -realiser une periode de une second pour le compteur remettre à 0
objectif de séance 2:
-lancer le code C via le script
-realiser l'émission et la reception avec FPGA
objectif de scéance 3:
-recuperer la mesure du sonar et l'afficher
-transferer le script sur une foxboard et tester
-tests avec la partie electronique
Partie FPGA:
Schéma global de notre sujet ---Contrôle de sonar:
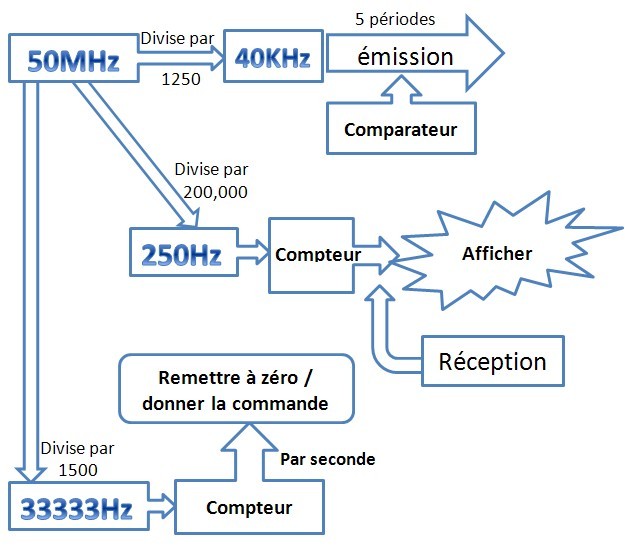

Schéma électronique du FPGA

Des fonctions de chaque parties
1) Pour obtenir une signale de 40KHz, on utilise quatre CDIV en série qui divisent l’origine fréquence 50MHz.
50M/5/10/5/5=40K

2) Au niveau d’émettre ce signale de 40KHz en 5 périodes, on utilise un compteur pour compter le nombre des périodes et aussi un comparateur. Si la valeur du compteur est supérieure à 5, GT=1, donc on ne peut pas continuer à émettre ce signale.

3) Au niveau de la réception, dès que le signale est réceptionné, il va donner un signal monté aux deux D flip-flops, alors on peut afficher la valeur du compteur. Comme on utilise un compteur de 8 bits, la valeur maximum qu’il compte par seconde est 255, donc on met la fréquence du compteur à 250Hz, alors il n’y a pas de risque du dépassement mais moins précis pour calculer la distance.

4) Comme le taux de rafraîchissement de la mesure sera fixé à 1 seconde, donc on utilise un compteur de 16 bits alimenté par une fréquence de 33,333Hz, car 2^15/33,333=0.98s. Après on redonner le commande d’émission. Et à la fin ce compteur remet à zéro.

Partie analogique:
Schéma théorique
- On doit utiliser des amplificateurs opérationnels pour augmenter ou diminuer le courrant pendant l’émission et la receptiont du signale.(non réaliser pratiquement)
divers
script Foxboard: http://172.26.79.111/script.html
Biblio: http://www.xul.fr/xml-ajax.html#ajax-construction http://blog.pascal-martin.fr/post/Un-premier-appel-Ajax-avec-Prototype