IMA4 2016/2017 EC1
Sommaire
Cahier des charges
Présentation générale du Projet
Le projet sera fait en utilisant un PC portable pour rendre compte de l'avancé de travail au travers d'un Wiki installé sur ce PC mais aussi pour développer le nouvel ordonnanceur.
La nouvelle plateforme sera réalisé sous la forme d'une carte électronique mais dans l'attente de la réalisation de la carte, un prototype à base d'arduino et de carte JeeLabs pourra être utilisé.
Pour être précis, le travail à réaliser est décrit ci-dessous.
- Configurer le Wiki de type mediawiki présent sur PC portable, recopier le sujet du projet sur ce Wiki et préparer la structure de la page pour les futurs comptes-rendu.
- Router la carte électronique de la plateforme en partant de la carte réalisée dans le projet IMA5 "P19 Relai Ethernet LoRa". Prendre la version réalisée sous Frizing en retirant la Partie LoRa. Prenez soin d'ajouter quatre LEDs et quelques boutons commandées par le micro-contrôleur.
- Modifier l'ordonnanceur fourni pour utiliser le contrôleur Ethernet ENC28j60. Utilisez le bibliotheque ENC28j60 du projet IMA5 p19. L'ordonnanceur doit gérer les conflits sur le bus SPI. Les processus que l'ordonnanceur doit faire tourner sont:
- un processus pour faire clignoter une première LED à 1Hz.
- un processus pour faire clignoter une seconde LED à 2Hz.
- un processus pour envoyer des caractères sur le port série.
- un processus pour analyser les paquets Ethernet reçus et faire briller une LED multicouleur suivant les données du paquet Ethernet.
- un processus pour envoyer un paquet Ethernet à chaque fois que l'état d'un des deux boutons est modifié.
Choix du matériel
| Quantité | Référence | Description |
|---|---|---|
| 1 | Connecteur RJ45 | |
| 1 | TXB0104 | Convertisseur de niveaux |
| 1 | Enc28j60 | Contrôleur Ethernet |
| 1 | LM1117IMPX-5 | Régulateur 5V |
| 1 | LD1117AS-3.3 | Régulateur 3,3V |
| 1 | ATMEGA328p | Microcontrôleur |
| 1 | FT232RL | FTDI USB/série |
| 1 | Diode | |
| n | LEDs, Résistances, Capacités (voir projet Fritzing) |
Avancée du projet
Synthèse
| Tâche | Etat | Commentaire |
|---|---|---|
| Installation et configuration du Wiki | Effectué | Xavier Redon |
| Alimentation du Wiki | Effectué | Manlu Luo, corrigé par Xavier Redon |
| Routage de la carte électronique | Effectué | Ebauche par Manlu Luo, corrigé par Xavier Redon |
| Vérification de la carte électronique avant tirage | Effectué | |
| Réalisation du prototype | Effectué | |
| Réalisation de la carte électronique | Effectué | |
| Modification de la bibliothèque SPI | modifié | |
| Ecriture des nouvelles tâches | Effectué | |
| Test de l'ordonnanceur | Tester programmes |
Semaine 1
J'ai configuré le Wiki de type mediaWiki présent sur le PC portable. Après avoir créé la page principale, j'ai écrit le cahier des charges et j'ai commencé le projet.
J'ai lu le sujet du projet et analysé les étapes nécessaires pour réaliser le projet. J'ai essayé de concevoir la carte électronique sur Fritzing, mais je n'arrive pas à lancer le logiciel Fritzing.
REX> Le logiciel Fritzing peut se lancer par le menu applications, sous-menu Développement.
Semaine 2
J'ai modifié la carte électronique en me basant sur le projet IMA5 P19 Relai Ethernet Lora . J'ai supprimé la partie LoRa et ajouté 4 LEDs sur des sorties du micro-contrôleur.
j'ai commencé analysé le programme d'ordonnancement fournit et essayé comprendre le but de chaque fonction. Les fichiers du programme sont :
- iic.c, iic.h -> Bibliothèque I2C (inutile pour mon projet)
- iic_matrix.c, iic_matrix.h -> Bibliothèque pour les matrices I2C (inutile pour mon projet)
- scheduler.c, scheduler_private.h, scheduler_public.h -> Fichiers pour l'ordonnanceur lui-même, contient la fonction d'interruption ISR et la fonction d'ordonnancement scheduler() qui implante l'algorithme du tourniquet
- semaphore.c, semaphore.h -> Fichier pour les sémaphores permettant à plusieurs processus d'accéder proprement au port série et au bus SPI, ce n'est pas fondamental dans mon projet
- serial.c, serial.h -> Fonction d'initialisation et d'envoi de caractère sur le port série, nécessaire pour mon projet.
- spi.c, spi.h -> Fonction de gestion du bus SPI, il y a qu'une fonction d'envoi de caractère sur le bus, il faut y ajouter les fonctions plus complexes utilisées pour l'ENC28J60
- spi_display.c, spi_display.h -> Fichier pour l'affichage sur l'afficheur 7 segments, inutile dans mon projet
- spi_matrix.c, spi_matrix.h -> Fichier pour l'affichage sur la matrice de LEDs, inutile dans mon projet
- tasks.c, tasks.h -> Fichier comportant tous les processus à lancer sous forme de fonctions, je doit supprimer les fonctions inutiles pour mon projet et ajouter les nouvelles
- timer.c, timer.h -> Fichier pour la configuration du minuteur, indispensable pour l'ordonnanceur.
Semaine 3
J'ai continué à modifier la carte électronique sur Fritzing. J'ai changé la position des LEDs et d'un grand nombre d'autres composants. En effet, après suppression de la partie LoRa, il fallait diminuer la surface de la carte.
J'ai commencé à lire les programmes. J'ai compris les fichiers de gestion de la matrice de LEDs mais ces fichiers ne sont pas utiles pour le projet.
Je ne sais pas comment mettre mon fichier Fritzing sur ce Wiki.
REX> Il faut se connecter et cliquer sur "Importer un fichier". Il fallait aussi changer des éléments de configuration de mediawiki.
La schématique et le circuit sont visibles ci-dessous :


Semaine 4 & 5
J'ai écrit un premier programme pour les tâches de LEDs mais il n'utilisait pas l'ordonnanceur. J'ai ensuite préféré utiliser FreeRTOS plutôt que l'ordonnanceur des professeurs pour les TPs de système.
J'ai aussi essayé de vérifier la carte mais il est difficile de trouver des references design pour les différents circuits de la carte. Ces circuits sont :
- LD1117AS 3.3V, un régulateur de tension 3,3V ;
- LM1117IMPX-5, un régulateur de tension 5V ;
- un microcontrôleur ATMega328p ;
- un contrôleur Ethernet ENC28J60 ;
- un convertisseur USB série FT232RL.
J'ai trouvé les references design pour les deux régulateurs. Pour le FT232RL et le ATMega328p il est possible d'utiliser la schematique de l'Arduino duemilanove. Enfin pour le ENC28J60 on peut utiliser une schématique de TaaraLabs.
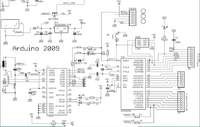
Schématique Arduino duemilanove

Schématique LM1117IMPX-5

Schématique LD1117AS-3.3
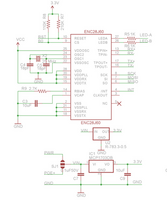
Schématique ENC28J60




semaine 6
J'ai continué de développer les tâches sous FreeRTOS.
D'abord, j'ai écrit les tâches pour faire clignoter deux LEDs à 1Hz et 2Hz. Ces tâches sont appelées vTaskLED1 et vTaskLED2 et réalisent les deux fréquences. Ces tâches ne sont pas très compliqué. Les LEDs sont connectées au port D, donc, dans le début du programme, j'initialise le port D. Dans les fonctions vTaskLED, je dois d'abord attendre une période de temps (pour les différentes fréquences, la période de temps est différente). Pour cela j'utilise, par exemple, vTaskDelay( 1000 /portTICK_PERIOD_MS). Et puis, je modifie la valeur du port D, par exemple avec PORTD ^=(1<<2), pour faire changer l'état de la LED une fois.
L'encadrant a accepté que ce travail continue avec FreeRTOS. Une première version des tâches de gestion des paquets Ethernet est écrite mais elle ne correspondait pas au sujet. Il est demandé de transformer ces tâches vTaskEthReadData et vTaskEthSendData pour qu'elles aient le comportement attendu.
La tâche vTaskEthReadData ne doit accepter que des trames avec trois octets de données et utiliser ces octets pour l'état de la LED multicouleurs. De même la tâche vTaskEthSendData doit envoyer un octet de donnée comportant l'état des boutons (uniquement quand un état change).
On choisit 0x1111 comme type pour ces paquets Ethernet.
Prenons quelques exemples :
- un paquet Ethernet de 100 octets est reçu : il est supprimé
- un paquet Ethernet de 17 octets est reçu mais le type est 0x806, le paquet est supprimé
- un paquet Ethernet de 17 octet et de type 0x1111 est reçu, les octets 15, 16 et 17 sont examinés et la LED est mise dans l'état correspondant couleurs RGB de ces 3 octets.
- un bouton est appuyé, un paquet Ethernet de 15 octets est envoyé, l'adresse Ethernet destination est
ff:ff:ff:ff:ff:ffle type est 0x1111 et l'octet de donnée est tel que le bit correspondant au bouton est à 1.
semaine 7
Pour la partie lecture des paquets Ethernet, j'écris la fonction vTaskEthReadData. Je définis un tableau uint8_t packetReceived[ETH_RCPT] pour stocker le paquet. Ce paquet comprend, l'adresse de destination (6 octets), l'adresse source (6 octets), le type de paquet (2 octets) et les données (3 octets pour note application). Les données comportent 3 octets pour contrôler 3 LEDs simples, les 3 LEDs simples constituent une LED multicouleurs.
Je fais une boucle recevoir tous les octets du paquet. Je dois premièrement vérifier si un paquet Ethernet est arrivé. Après, j'utilise enc28j60ByteRead pour lire les données un octet par un octet et puis stocker les valeurs dans le tableau.
Après avoir stocké toutes les données dans le tableau, je vérifie le type de paquet. Si le type est correct, je vérifie les 3 dernièrs octets du tableau pour savoir comment mettre les LEDs correspondantes.
Voici le programme:
void vTaskEthReadData(void* pvParameters){
(void)pvParameters;
int nb_ethernet = 0;
unsigned char packetReceived[ETH_RCPT];
TickType_t xTicksToWait = 10;
while(1){
while( xSemaphoreTake( spiMutex, xTicksToWait ) != pdTRUE ){ }
nb_ethernet = enc28j60PacketReceive(); //Cheack if there is data in eth device
xSemaphoreGive( spiMutex );
if(nb_ethernet==0){ vTaskDelay( 5 / portTICK_PERIOD_MS ); continue; }
if(nb_ethernet==64){
int i;
for(i=0;i<ETH_RCPT;i++){
while( xSemaphoreTake( spiMutex, xTicksToWait ) != pdTRUE ){ }
packetReceived[i] = enc28j60ByteRead();
xSemaphoreGive( spiMutex );
}
/* Test sur l'adresse Ethernet source (fait par chip ENC28j60) */
if(packetReceived[13]==type[0] && packetReceived[12]==type[1]){/* Test sur le type de paquet Ethernet */
if(packetReceived[14]!=0) PORTD |= (1<<5); else PORTD &= ~(1<<5);
if(packetReceived[15]!=0) PORTD |= (1<<6); else PORTD &= ~(1<<6);
if(packetReceived[16]!=0) PORTD |= (1<<7); else PORTD &= ~(1<<7);
}
}
while( xSemaphoreTake( spiMutex, xTicksToWait ) != pdTRUE ){ }
enc28j60FreeMemory();
xSemaphoreGive( spiMutex );
}
}
Semaine 8
Après, je fait la partie pour envoyer la paquet. Pour recevoir un signal de l'envoyer, je ajoute les boutons. Je premièrement écrit la fonction de bouton, bouton(num) pour valider si le bouton est appuyé ou pas. Et puis, je écrit une fonction de bouton_com pour tester s'il y a le montant ou descendant du bouton.
Pour réaliser le but de envoyer paquet, j'écrit la fonction de vTaskEthSendData. J'ai un tableau packetToSend. Chaque fois, je vérifie le résultat de la bouton_com. Si l'état de bouton est changé, on commence l'envoyer. Je utilise enc28j60InitializeSend pour initialiser les préparation. Et puis, je utilise memcpy pour copier les valeurs dans un table vers un autre. Je copie les adresse de destination,de source et l'état de bouton vers un pointeur(un tableau) packetToSend.
Voici le programme:


Semaine 9
Après j'ai fini le programme, je teste le programme sur breadboard. Et le programme marche sur le breadboard, voici est la photo de breadboard.

Après la conception de la dernière version du PCB, la carte est envoyée à la fabrication. Je peux ensuite souder les composants. Voici une photo de la carte soudée au four.

Mais quand on essaye la carte, elle ne fonctionne pas. Pour corriger, on utilise une nouvelle carte avec juste la partie Microcontrôleur soudée. On essaye cette partie avec logiciel Arduino. Voici la capture d'écran montrant qu'il a été possible de transférer l'amorce sur le microcontrôleur.




