Projet IMA3 P7, 2015/2016, TD2
Sommaire
Projet IMA3-SC 2015/2016 : Détection de présence
Cahier des charges
Portique d'un magasin où la détection de présence à la porte informe le caissier l'arrivée d'un nouveau client pour décider de lui ouvrir la porte ou pas.
On se servira alors d'un capteur photoélectrique pour détecter l'arrivée du client ,afficher sur l'ordinateur du caissier le message suivant " Client à la porte" ensuite attendre la réponse du caissier pour pouvoir tourner le servomoteur qui servira à ouvrir la porte .
Matériel
- Un servomoteur;
- Un capteur photoélectrique
- NanoBoard
- Une carte Rasberry Pi
Séance 1
Partie électronique
Le servomoteur fourni dans le projet est piloté grâce à une MLI( ou PWM en anglais). Cet MLI nous permettra de controler la position angulaire du servomoteur, qui est régi de la manière suivante, d'après sa datasheet
Pour initialiser à 0°, il faut fournir un signal de 50Hz avec 1,5 ms à l'état haut

Et pour avoir un angle de 90°, on fournit toujours un signal de 50 Hz mais avec un état haut de 2.5 ms cette fois-ci

Nous nous devons alors d'utiliser un PWM . Ce PWM qu'on implémentera sur Altium, aura la structure suivante:

Nous avons alors entamé la prise en main du complexe Nanoboard-Altium à travers un tutoriel qui nous a permis de réaliser l'affichage d'un compteur 4 bits sur des leds

Partie informatique
Partie informatique
Configuration, via connexion série, de la raspberry accessible via ssh (pi@172.26.79.7).
Installation de la bibliothèque libwebsockets.
Installation d'apache2 pour avoir un serveur web.
Partie Arduino
Montage effectué
Test du matériels fournis avec des fonctions simple sous le logiciels Arduino
Séance 2
Partie électronique
Lors de cette deuxième séance, nous avoir réaliser sur Altium la MLI pensée lors de la première séance et qui va ainsi nous permettre de piloter notre servomoteur

CLKBRD:Horloge interne
CLKGEN:Générateur de fréquence
CB8CEB: Compteur 8 bits
COMPM8B:Comparateur 8 bits
SW_USER0:Bouton poussoir
Montage expérimental
Notre PWM ainsi implémenté sur Altium, on refait le même protocole qu'au tutoriel fait à la séance n° 1 pour compiler notre montage et l'envoyer sur la nanobaord.
A travers nos expérimentations, on trouve que pour avoir 1.5ms d'état haut( position 0 donc), il faut envoyer le mot 0b00001111
Pour 90°: 0b00100000
On branche la sortie sur un oscilloscope et on obtient le graphe ci-dessous, relatif à un PWM

On réalise alors le montage ci-dessous à l'aide d'un servomoteur, d'une plaque d'essai, d'un générateur et notre nanoboard.

Pour avoir une fréquence de 50 Hz à la sortie du PWM on doit régler la fréquence du générateur de fréquence à 12,698 KHz

Partie informatique
Réalisation de Programme Arduino
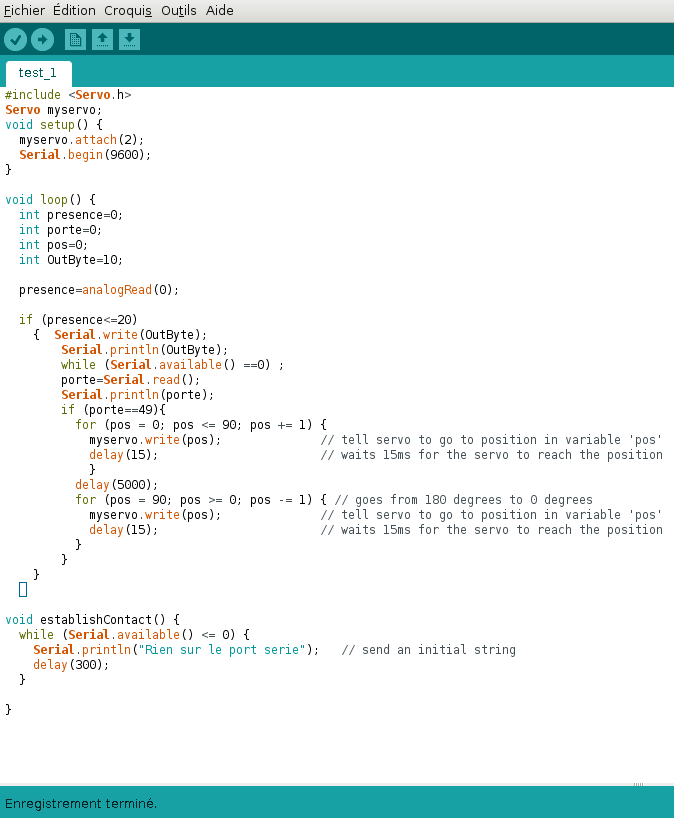

Séance 3
Partie électronique
PARTIE ELECTRONIQUE EN COURS DE REDACTION
MERCI
Partie informatique
Programmes de la configuration et la mise en marche de la liaison série
"Serial.c "
/*
* Serial library */
//// // Include files ////
- include <stdio.h>
- include <stdlib.h>
- include <unistd.h>
- include <fcntl.h>
- include <termios.h>
- include <strings.h>
- include <sys/types.h>
- include <sys/ioctl.h>
- include <sys/file.h>
- include <linux/serial.h>
- include "serial.h"
//// // Functions //// // // Open serial port device // int serialOpen(char *device,int mode){ int flags=(mode==SERIAL_READ?O_RDONLY:(mode==SERIAL_WRITE?O_WRONLY:O_RDWR)); int fd=open(device,flags|O_NOCTTY|O_NONBLOCK); if(fd<0){ perror(device); exit(-1); } return fd; }
// // Serial port configuration // void serialConfig(int fd,int speed){ struct termios new; bzero(&new,sizeof(new)); new.c_cflag=CLOCAL|CREAD|speed|CS8; new.c_iflag=0; new.c_oflag=0; new.c_lflag=0; /* set input mode (non-canonical, no echo,...) */ new.c_cc[VTIME]=0; /* inter-character timer unused */ new.c_cc[VMIN]=1; /* blocking read until 1 char received */ if(tcsetattr(fd,TCSANOW,&new)<0){ perror("serialInit.tcsetattr"); exit(-1); } }
// // Serial port termination // void serialClose(int fd){ close(fd); }
Serial.h
/*
* Public definitions for serial library */
//// // Constants ////
- define SERIAL_READ 0
- define SERIAL_WRITE 1
- define SERIAL_BOTH 2
//// // Public prototypes //// int serialOpen(char *device,int mode); void serialConfig(int fd,int speed); void serialClose(int fd);
Programme du WEBSOCKETS
- include <string.h>
- include <libwebsockets.h>
- include <stdio.h>
- include <stdlib.h>
- include <unistd.h>
- include <fcntl.h>
- include <termios.h>
- include <sys/types.h>
- include <sys/ioctl.h>
- include <sys/file.h>
- include <linux/serial.h>
- include "serial.h"
- define MAX_FRAME_SIZE 1024
- define WAIT_DELAY 50
- define TAILLE_MESS 2
- define SERIAL_DEVICE "/dev/ttyACM0"
int serie;
static int callback_http(
struct libwebsocket_context *this, struct libwebsocket *wsi,enum libwebsocket_callback_reasons reason, void *user,void *in,size_t len)
{ return 0; }
static int callback_my(
struct libwebsocket_context * this, struct libwebsocket *wsi,enum libwebsocket_callback_reasons reason, void *user,void *in,size_t len)
{ static char message[TAILLE_MESS+LWS_SEND_BUFFER_PRE_PADDING+LWS_SEND_BUFFER_POST_PADDING]; unsigned char valeur;
switch(reason){
case LWS_CALLBACK_ESTABLISHED:
printf("connection established\n");
// Declenchement d'un prochain envoi au navigateur
libwebsocket_callback_on_writable(this,wsi);
break;
case LWS_CALLBACK_RECEIVE:
// Ici sont traites les messages envoyes par le navigateur
printf("received data: %s\n",(char *)in);
break;
case LWS_CALLBACK_SERVER_WRITEABLE:
// Ici sont envoyes les messages au navigateur
if(read(serie,&valeur,1)==1){
char *out=message+LWS_SEND_BUFFER_PRE_PADDING; sprintf(out,"%02d",valeur);
libwebsocket_write(wsi,(unsigned char *)out,TAILLE_MESS,LWS_WRITE_TEXT);
}
libwebsocket_callback_on_writable(this,wsi);
break; default: break; }
return 0; }
static struct libwebsocket_protocols protocols[] = {
{
"http-only", // name
callback_http, // callback
0, // data size
0 // maximum frame size
},
{"myprotocol",callback_my,0,MAX_FRAME_SIZE},
{NULL,NULL,0,0}
};
int main(void) {
int port=9000;
struct lws_context_creation_info info;
memset(&info,0,sizeof info);
info.port=port;
info.protocols=protocols;
info.gid=-1;
info.uid=-1;
struct libwebsocket_context *context=libwebsocket_create_context(&info);
if(context==NULL){
fprintf(stderr, "libwebsocket init failed\n"); return -1; }
printf("starting server...\n");
int c=0; int serie=serialOpen(SERIAL_DEVICE,SERIAL_BOTH); serialConfig(serie,B9600); if(write(serie,&c,sizeof(char))!=1){ perror("main.write"); exit(-1); } int i; for(i=0;i<3;i++){
if(read(serie,&c,sizeof(char))!=1){ perror("main.read"); exit(-1); }
printf("%02x\n",c);
}
serialClose(serie); exit(0);
while(1){
libwebsocket_service(context,WAIT_DELAY); }
libwebsocket_context_destroy(context); return 0; }